Six papers from Triple-I Institute have been accepted by the IEEE CASE 2025 International Conference

The IEEE International Conference on Automation Science and Engineering (CASE), hosted by the IEEE Robotics and Automation Society (RAS), is one of the three flagship conferences with high prestige in the field of automation. As an important international academic exchange platform for interdisciplinary automation research across industries, the CASE conference is dedicated to promoting in-depth development and wide application of fundamental research in automation, bringing together top scholars and industry elites from around the world to discuss cutting-edge technologies. The 21st CASE conference (CASE 2025) will be grandly held from August 17 to 21, 2025, in Los Angeles, USA.
In this conference, the faculty and student team from the Industrial Informatics and Intelligence Institute (Triple-I) at Hong Kong University of Science and Technology (Guangzhou) stood out with six high-quality academic papers selected, fully demonstrating the institute’s outstanding research capabilities in the fields of automation science and engineering.
Focusing on the forefront research and practical applications of industrial informatics and intelligent technologies, Triple-I is committed to exploring innovative models and implementation paths for intelligent transformation. The institute actively builds a collaborative innovation system integrating industry, academia, and research, establishing deep cooperation relations with government agencies, leading enterprises, and all sectors of society, jointly promoting the high-quality development and intelligent upgrade of industrial sectors in the Guangdong-Hong Kong-Macao Greater Bay Area and even globally.
Currently, Triple-I has established strategic partnerships with many well-known enterprises at home and abroad, including Huawei Technologies Co., Ltd., Tencent Holdings Limited, Guangdong Jumper Thermal Technology Co., Ltd.,AKM Electronics Industrial (Pan Yu) Co., Ltd., China International Marine Containers (Group) Co., Ltd., among other leading companies in the industry. The scope of cooperation covers several strategic emerging industries such as information technology, intelligent manufacturing, new energy, injecting strong impetus into the transformation of scientific and technological achievements and industrial innovation and development.
Paper One:
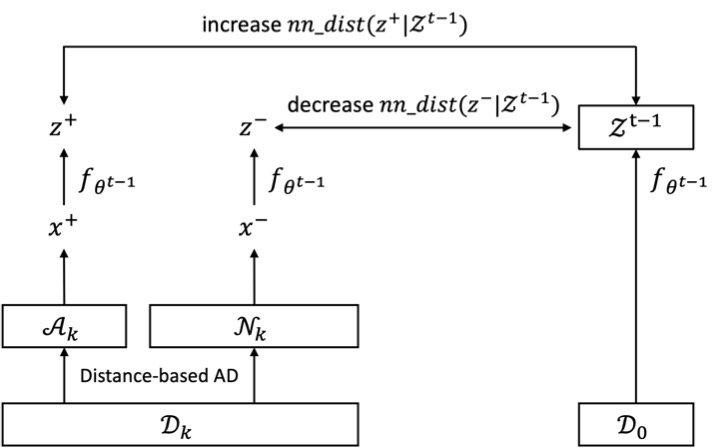
Title: Federated Learning for Deep Anomaly Detection with Noisy and Heterogeneous Data
Author:
Ao Li, The Hong Kong University of Science and Technology (Guangzhou); The Hong Kong University of Science and Technology
Songze Li, the School of Cyber Science and Engineering, Southeast University; the Engineering Research Center of Blockchain Application, Supervision and Management (Southeast University), Ministry of Education
Fugee Tsung, The Hong Kong University of Science and Technology (Guangzhou); The Hong Kong University of Science and Technology
Abstract:
We consider the problem of unsupervised learning for deep anomaly detection (DAD) in a federated learning (FL) network, consisting of a central server and many distributed clients. The conventional FedAvg algorithm involves clients training local DAD models with their private datasets, and then uploading these models to the server for aggregation into a global model. In practical scenarios, this framework faces two major challenges: 1) unlabeled training datasets may contain unknown anomalies; 2) training datasets from different clients are typically non-independent and identically distributed (non-IID). To address these problems, we propose FedDAD, a robust FL framework for training DAD models with noisy and heterogeneous data. In FedDAD, a small public dataset at the server, containing only a few normal samples (e.g., one sample from each normal class), serves as a normal anchor in the latent space across all clients. This anchor significantly improves the accuracy of identifying unknown anomalies at clients, in the presence of data heterogeneity. Having identified anomalies, clients utilize contrastive learning to train local feature extractors that further enhance the separation between normal and abnormal data. Extensive experimental results demonstrate the uniform superiority of FedDAD over all FL baselines across various settings and datasets. Furthermore, the model trained with FedDAD even achieves comparable performance to the model trained in a centralized manner.
Paper Two:
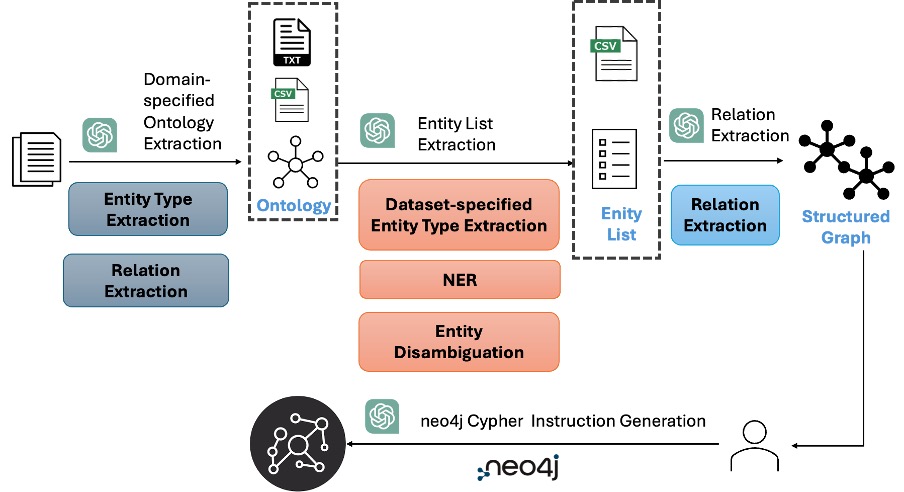
Title: Automated Knowledge Graph Construction for Supply Chain Datasets Assisted by LLMs
Author:
Luxuan Wang, The Hong Kong University of Science and Technology (Guangzhou); The Hong Kong University of Science and Technology
Fugee Tsung, The Hong Kong University of Science and Technology (Guangzhou); The Hong Kong University of Science and Technology
Abstract:
In today’s data-driven supply chain management landscape, establishing connections among stakeholders from diverse resources is essential for effective analysis and decisionmaking. Knowledge graphs (KGs) provide a transformative solution by organizing fragmented inventory data into semantically rich, interconnected networks, enabling contextualized insights and robust reasoning. However, automating KG construction for supply chain datasets is challenging due to issues like heterogeneous data integration (e.g., text documents, spreadsheets), domain-specific contextualization, and the need to model implicit operational dependencies. This paper introduces a novel framework that leverages largelanguage models (LLMs) to address these challenges. Our AutoKG4SC approach automates the extraction of entities from various sources and constructs KGs to capture complex interdependencies among these entities. We utilize in-context prompting for ontology construction, Named Entity Recognition (NER), and Relation Extraction (RE) tasks, thereby eliminating the need for extensive domain-specific training and human prior knowledge. We validate the framework through a case study, which demonstrates AutoKG4SC’s ability to construct high-quality KGs from supply chain datasets. This research presents an effective framework and prompt strategy for KG construction, which can be easily adapted to datasets with richer information and other application scenarios.
Paper Three:
Title: MCCoder: Streamlining Motion Control with LLM-Assisted Code Generation and Rigorous Verification
Author:
Yin Li, The Hong Kong University of Science and Technology (Guangzhou)
Liangwei Wang, The Hong Kong University of Science and Technology (Guangzhou)
Shiyuan Piao, The Hong Kong University of Science and Technology (Guangzhou)
Boo-Ho Yang, MOVENSYS Inc.
Ziyue Li, University of Cologne
Wei Zeng, The Hong Kong University of Science and Technology (Guangzhou)
Fugee Tsung, The Hong Kong University of Science and Technology (Guangzhou); The Hong Kong University of Science and Technology.
Abstract:
Large Language Models (LLMs) have demonstrated significant potential in code generation. However, in the factory automation sector—particularly motion control—manual programming, alongside inefficient and unsafe debugging practices, remains prevalent. This stems from the complex interplay of mechanical and electrical systems and stringent safety requirements. Moreover, most current AI-assisted motion control programming efforts focus on PLCs, with little attention given to high-level languages and function libraries.
To address these challenges, we introduce MCCoder, an LLM-powered system tailored for generating motion control code, integrated with a soft-motion controller. MCCoder improves code generation through a structured workflow that combines multitask decomposition, hybrid retrieval-augmented generation (RAG), and iterative self-correction, utilizing a well-established motion library. Additionally, it integrates a 3D simulator for intuitive motion validation and logs of full motion trajectories for data verification, significantly enhancing accuracy and safety.
In the absence of benchmark datasets and metrics tailored for evaluating motion control code generation, we propose MCEVAL, a dataset spanning motion tasks of varying complexity. Experiments show that MCCoder outperforms baseline models using Advanced RAG, achieving an overall performance gain of 33.09% and a 131.77% improvement on complex tasks in the MCEVAL dataset.
Paper Four:
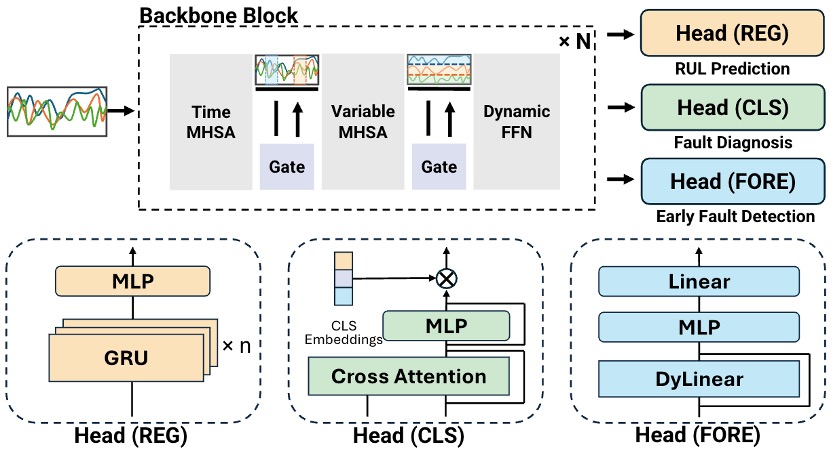
Title: Empowering PHM Applications with Time Series Foundation Models: A Unified Multi-Task Learning Approach
Author:
Yongzi Yu, The Hong Kong University of Science and Technology (Guangzhou)
Feng Zhu, The Hong Kong Polytechnic University
Di Wang, Shanghai Jiao Tong University
Fugee Tsung, The Hong Kong University of Science and Technology (Guangzhou); The Hong Kong University of Science and Technology
Abstract:
Currently, small, task-specific models dominate the development of Prognostics and Health Management (PHM) applications. However, these isolated models often struggle to address the diverse and fragmented requirements present in real industrial environments. The emergence of time-series foundation models has attracted considerable attention, providing a more flexible and effective approach for PHM applications. This study explores how time-series foundation models can enhance PHM applications. Using a typical aero-engine degradation dataset as the research context, we propose a novel unified multi-task learning approach that leverages pre-trained time-series foundation models. Specifically, we utilize these foundation models as the basis for time-series representation learning to tackle various PHM tasks. To accommodate the diverse requirements of these tasks, we design specialized output heads tailored for multi-task learning objectives. The pre-trained foundation model is then fine-tuned with specific datasets to develop localized task-specific models. We validate our approach through case studies using the C-MAPSS datasets. The experimental results demonstrate the feasibility and effectiveness of foundation models for the development of PHM applications.
Paper Five:
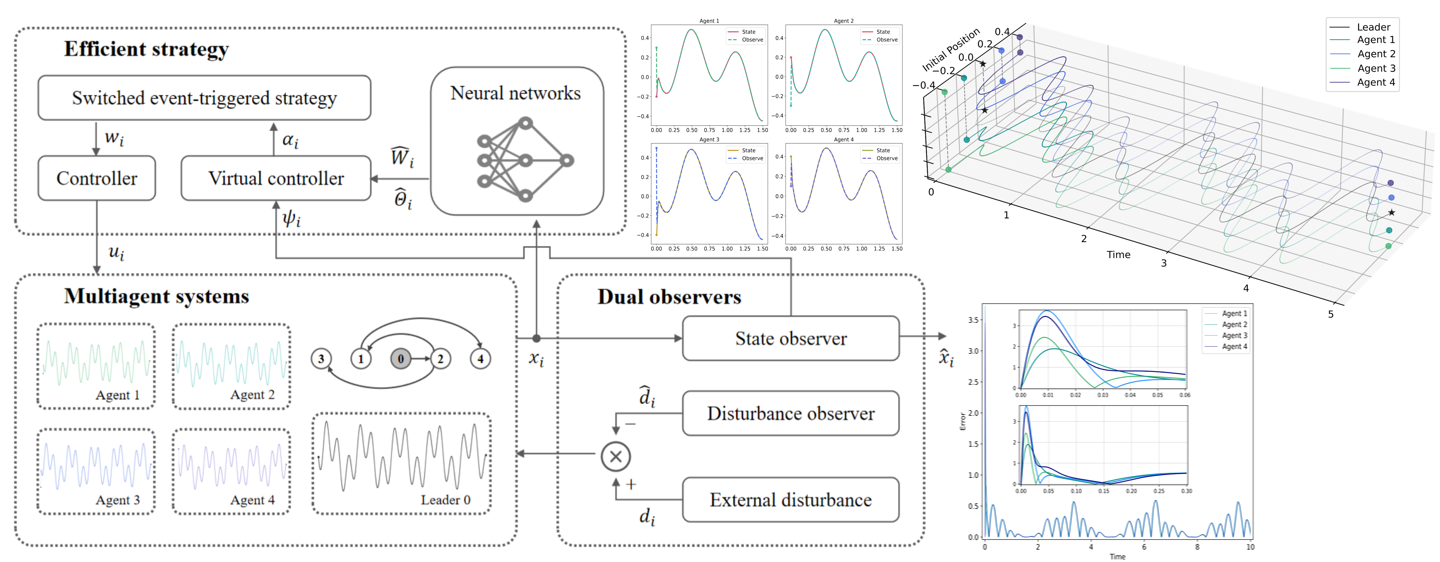
Title: An Efficient Dual-Observer Method for Leader-Following Consensus Control of Multiagent Systems
Author:
Ziming Wang, The Hong Kong University of Science and Technology (Guangzhou)
Shiyuan Piao, The Hong Kong University of Science and Technology (Guangzhou)
Yiding Ji, The Hong Kong University of Science and Technology (Guangzhou) ; The Hong Kong University of Science and Technology
Xin Wang, Southwest University
Fugee Tsung, The Hong Kong University of Science and Technology (Guangzhou); The Hong Kong University of Science and Technology
Abstract:
Many existing studies on multi-agent systems (MASs) control have primarily focused on output or consensus tracking problems, often neglecting the impact of external disturbances and the efficient use of control resources. In this paper, we propose a novel adaptive dual-observer control scheme that implements a switched-threshold event-triggered strategy to optimize communication resource utilization. A neural network is leveraged to approximate the nonlinear dynamics of MASs, and the adaptive control strategy is designed to achieve consensus tracking. Then we provide stability analysis to ensure that each agent’s output can effectively follow the leader’s trajectory with a controllable bounded tracking error. Additionally, our scheme is capable to pre-select the lower bound of triggering intervals, which prevents Zeno behaviors, a critical aspect for the practical implementation of controllers. Finally, simulation results on a radar transmitter formation problem validate the effectiveness of our proposed approach.
Paper Six:
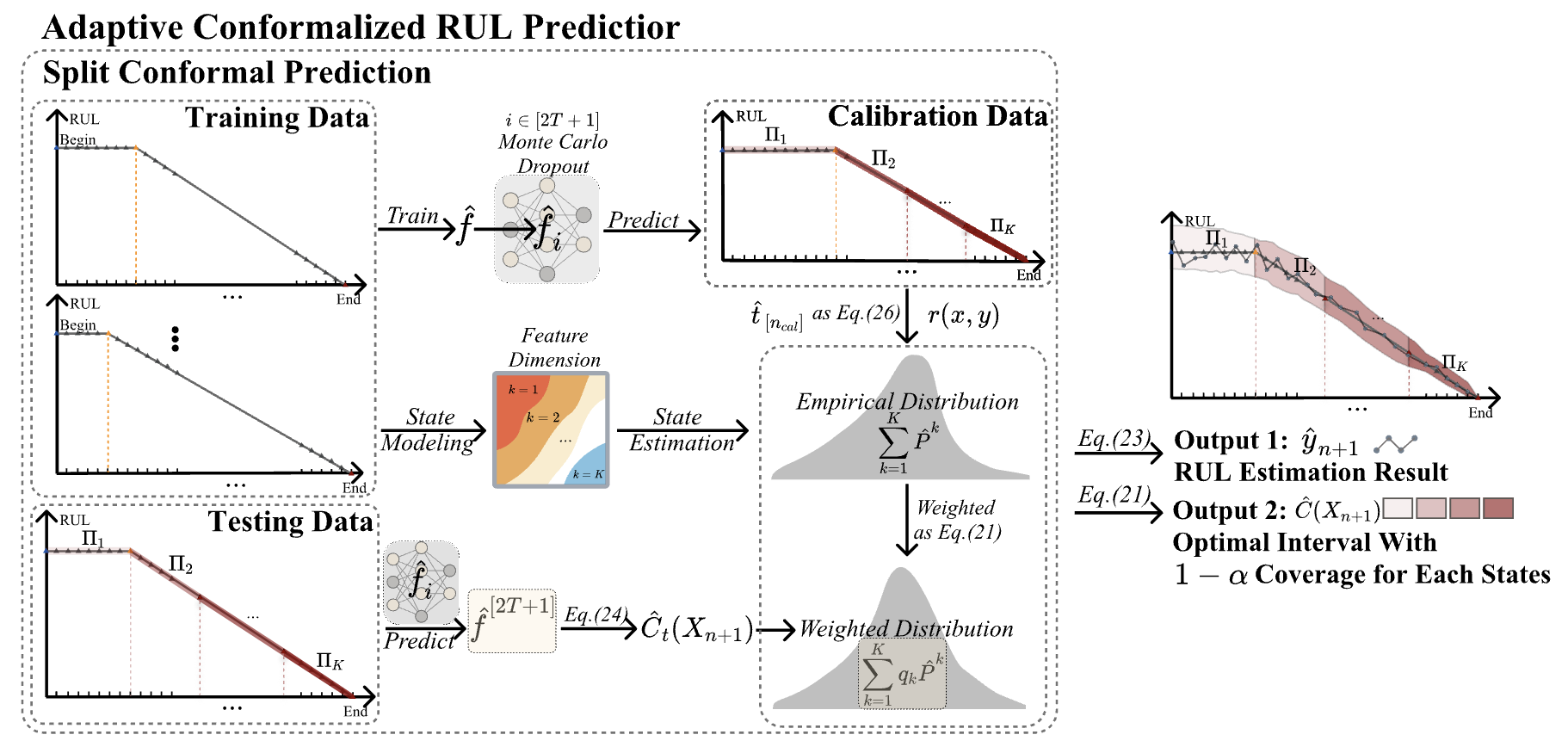
Title:Quantify Uncertainty Beyond Covariate Shift in RUL Estimation by Conformal Prediction
Author:
Shiyuan Piao, The Hong Kong University of Science and Technology (Guangzhou)
Ying Wang, Shanghai Jiao Tong University
Ruyi Huang, The Hong Kong Polytechnic University
Di Wang, Shanghai Jiao Tong University
Fugee Tsung, The Hong Kong University of Science and Technology (Guangzhou); The Hong Kong University of Science and Technology
Abstract:
Recent advancements in Automation Science and Engineering (ASE) have improved Prognostics and Health Management (PHM) methods for estimating the remaining useful life (RUL) of industrial equipment. While accurate RUL prediction is crucial for machinery reliability, deep learning (DL) models often neglect real-world uncertainty.
Uncertainty quantification (UQ) provides essential confidence measures for risk-aware maintenance, yet faces challenges like covariate shift and reliance on optimization or distribution assumptions.
To address these issues, we introduce an Adaptive Conformalized RUL Predictor (ACRP) that surpasses traditional methods. Our approach combines conformal prediction with a group-weighted strategy to achieve UQ in a model-free, distribution-free manner with rigorous theoretical guarantee, ensuring reliable prediction intervals that meet efficiency and validity criteria under covariate shift. It is adaptable to any model, and extensive experiments demonstrate its robustness and versatility, enhancing the trustworthiness of AI-driven PHM solutions in industrial environments.