IEEE国际自动化科学与工程会议(CASE,全称为International Conference on Automation Science and Engineering)是IEEE机器人与自动化学会(RAS)主办的三大旗舰级会议之一,在自动化领域享有极高声誉。作为跨行业、多学科自动化研究的重要国际学术交流平台,CASE会议致力于推动自动化基础研究的深入发展与广泛应用,汇聚全球顶尖学者与业界精英共同探讨前沿技术。第21届CASE会议(CASE 2025)将于2025年8月17日至21日在美国洛杉矶隆重举行。
Title: Federated Learning for Deep Anomaly Detection with Noisy and Heterogeneous Data
面向带有噪声和异构数据的深度异常检测的联邦学习
Author:
Ao Li, The Hong Kong University of Science and Technology (Guangzhou); The Hong Kong University of Science and Technology
Songze Li, the School of Cyber Science and Engineering, Southeast University; the Engineering Research Center of Blockchain Application, Supervision and Management (Southeast University), Ministry of Education
Fugee Tsung, The Hong Kong University of Science and Technology (Guangzhou); The Hong Kong University of Science and Technology
主要内容:
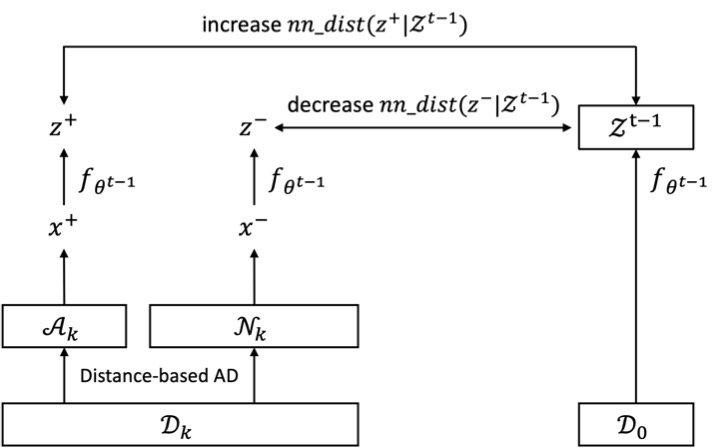
我们研究在联邦学习框架下进行深度异常检测(DAD)的无监督学习问题。传统的联邦学习算法在实际应用中面临两个主要挑战:1)训练数据中可能含有未知异常;2)客户端的数据通常是非独立同分布的。为了解决上述问题,我们提出了 FedDAD,一个用于训练 DAD 模型的、面向噪声和异构数据的联邦学习框架。FedDAD 利用服务器端少量正常样本作为“锚点”,提升了客户端在异构数据下识别异常的能力。识别出异常数据后,客户端利用对比学习来训练本地特征提取器,进一步增强对正常数据与异常数据的区分能力。实验结果表明,使用 FedDAD 训练得到的模型甚至能够达到与集中式训练的模型相当的性能。
论文二:
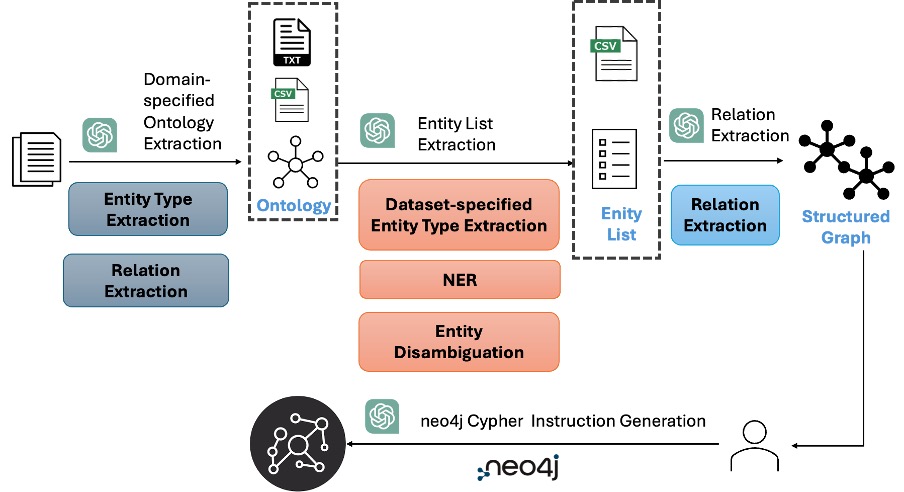
Title: Automated Knowledge Graph Construction for Supply Chain Datasets Assisted by LLMs
大语言模型辅助下的供应链数据集知识图谱的自动构建
Author:
Luxuan Wang, The Hong Kong University of Science and Technology (Guangzhou); The Hong Kong University of Science and Technology
Fugee Tsung, The Hong Kong University of Science and Technology (Guangzhou); The Hong Kong University of Science and Technology
Title: Empowering PHM Applications with Time Series Foundation Models: A Unified Multi-Task Learning Approach
基于时间序列基础模型的PHM应用增强:一种统一的多任务学习方法
Author:
Yongzi Yu, The Hong Kong University of Science and Technology (Guangzhou)
Feng Zhu, The Hong Kong Polytechnic University
Di Wang, Shanghai Jiao Tong University
Fugee Tsung, The Hong Kong University of Science and Technology (Guangzhou); The Hong Kong University of Science and Technology
主要内容:
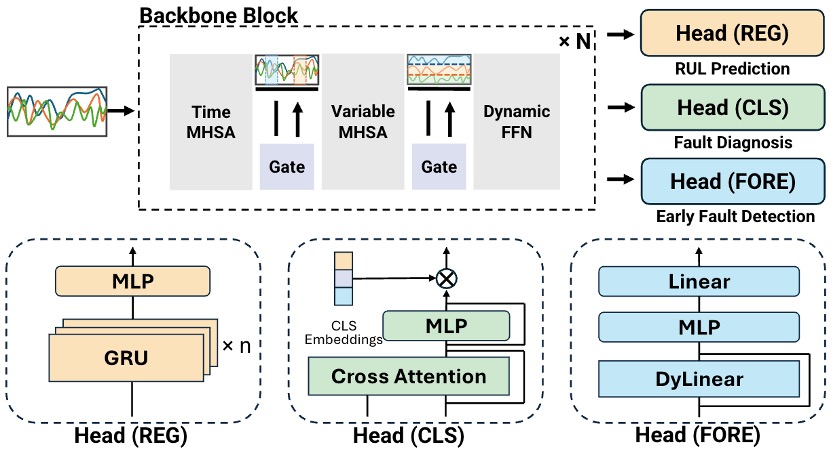
目前,小型的、面向特定任务的模型主导了故障预测与健康管理(Prognostics and Health Management, PHM)应用的开发。然而,这些孤立的模型往往难以应对实际工业环境中存在的多样化和碎片化需求。时间序列基础模型(time-series foundation models)的出现引起了广泛关注,为PHM应用提供了一种更加灵活且高效的方法。本研究探讨了时间序列基础模型如何增强PHM应用。以典型的航空发动机退化数据集为研究背景,我们提出了一种基于预训练时间序列基础模型的新型统一多任务学习方法。具体而言,我们利用这些基础模型作为时间序列表示学习的基础,以应对各种PHM任务。为了适应这些任务的多样化需求,我们设计了针对多任务学习目标的专用输出头。随后,使用特定数据集对预训练基础模型进行微调,以构建本地化的任务专用模型。我们通过使用C-MAPSS数据集进行案例研究,验证了所提方法的有效性。实验结果表明,基础模型在PHM应用开发中具有良好的可行性和显著的效果。
论文五:
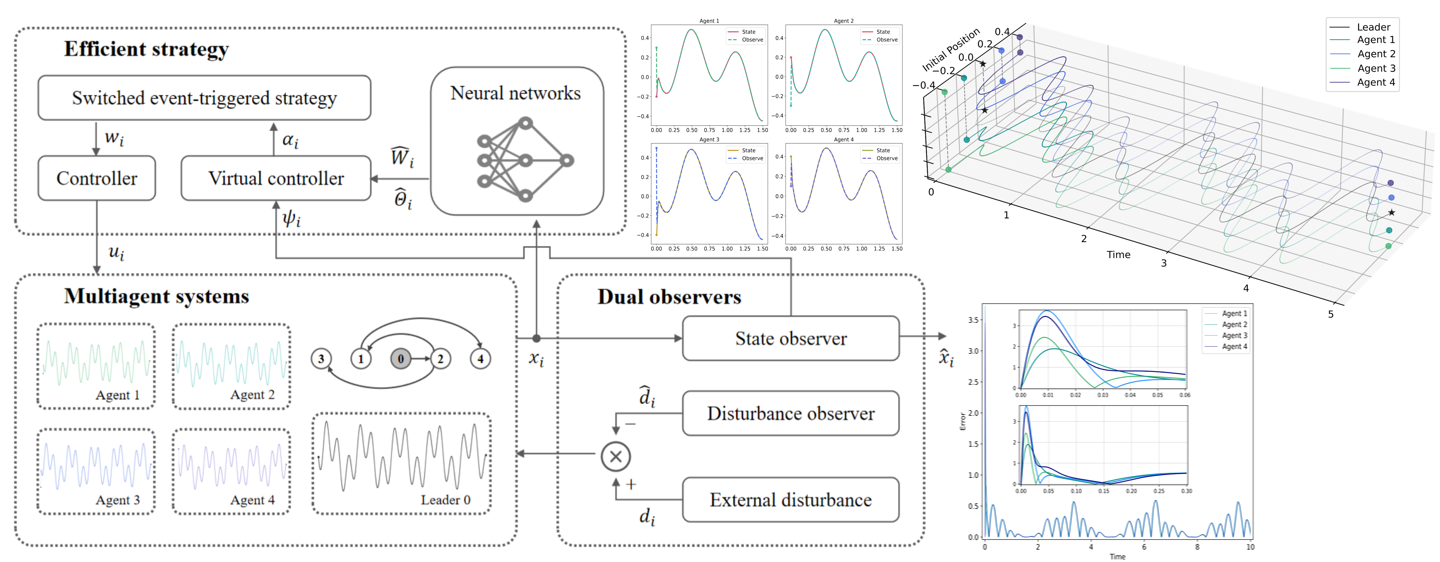
Title: An Efficient Dual-Observer Method for Leader-Following Consensus Control of Multiagent Systems
多智能体系统的领导–跟随一致性控制的高效双观测方法
Author:
Ziming Wang, The Hong Kong University of Science and Technology (Guangzhou)
Shiyuan Piao, The Hong Kong University of Science and Technology (Guangzhou)
Yiding Ji, The Hong Kong University of Science and Technology (Guangzhou) ; The Hong Kong University of Science and Technology
Xin Wang, Southwest University
Fugee Tsung, The Hong Kong University of Science and Technology (Guangzhou); The Hong Kong University of Science and Technology